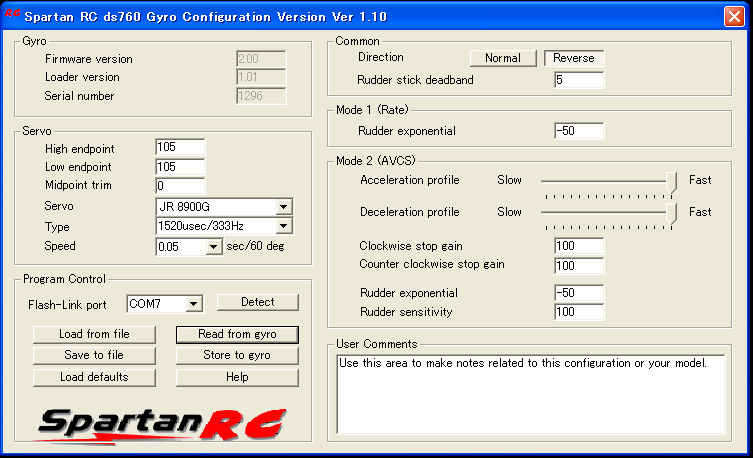
Firmware version
Loader version
Serial number
High endpoint
Low endpoint
Midpoint trim
Servo
Type
Speed
右か左のエンドポイント(リミット値)
右か左のエンドポイント(リミット値)
ニュートラルのトリム
Servo選択リストより搭載サーボを選択すれば、自動で Type・Speedは表示される
Flash-Link port
Load from file
Read from gyro
Save to file
Load defaults
Read from gyro
Store to gyro
Help
ポートを選択
ファイルからデータを開く
ジャイロの設定を見る
ファイルへデータを保存する
買ったときのデータにする
ジャイロの設定内容を読み込む
ジャイロに設定内容を書き込む
ヘルプ
Direction
Rudder stick deadband
ジャイロのリバース(ノーマル/リバース)
ラダースティックのニュートラルポイントの“広さ”
Rudder exponential
ラダーエックスポネンシアル(エックスポ)
Acceleration profile
Deceleration profile
Clockwise stop gain
Counter clockwise stop gain
Rudder exponential
Rudder sensitivity
スタートの早さ(ラダースティックをすぐにおすとき)
停止の早さ(早く回してすぐにラダースティックを離す)
時計回り停止の感度(右ラダー)
反時計回り 停止の感度(左ラダー)
ラダーエックスポネンシアル(エックスポ)
ジャイロよりラダースティックの感度
送信機でAVCSとノーマルモードを作成しておきます。
(下記のAVCSスイッチON−OFFとはAVCSとノーマルを切り替えると言うことです)
1-ジャイロのサーボ設定モードに入る:
ラダースティックを左にしながら、ジャイロをパワーオンして、そしてすぐに送信機のAVCSスイッチをON-OFFして下さい(設定モードに入るまで)。
2-サーボのタイプを選ぶ:
ジャイロのLEDが点滅します。1回ずつの点滅は1520us,333Hzタイプです。2回ずつは760us,333Hzです。3回ずつは1520us,250Hzです。ラダースティックで変わります(左か真中か右にしたら)。
AVCSスイッチOFF-ONにしたら、設定を保存します。
それができたらジャイロをパワーオフしてサーボを繋げて下さい。
3-サーボリバース:
サーボの動き方を確認して下さい。必要だったら送信機でリバースして下さい。
4-ジャイロリバースとエンドポイントの設定:
ラダースティックを真中にしながら、ジャイロをパワーオンして、そしてすぐに送信機のAVCSスイッチON-OFFして下さい(設定モードに入るまで)。
設定モードに入るとサーボが少し動きます。
4-1-ジャイロリバース:
ラダースティックを左にして下さい、ジャイロが自動的に左と右を覚えます。
AVCSスイッチOFF-ONにしたら、設定を保存します。
4-2-ローエンドポイント:
いまジャイロのLEDは2回ずつ光ります。好きなところまでラダースティックを左(右)にして、AVCSスイッチOFF-ONにして下さい。
4-3-ハイエンドポイント:
いま、LEDが3回ずつ光ります。好きなところまでラダースティックを右(左)にして、AVCSスイッチOFF-ONにして下さい。
終わるとLEDがONになります。そのときパワーオフして下さい。