Microbeast設定方法
初期設定・セットアップ・ジャイロ感度・パラメーター設定と大きく分けての4項があります。
1.送信機・レシーバーとMB接続設定
(サーボは周波数等の設定が未の為破損防止で現時点では接続しない)
1−1 送信機のデーターは新規に作成した方がよい。スワッシュモードは「H1」を選択する。
CCPMは選択しない。
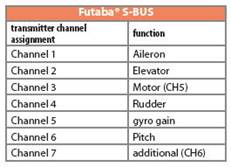
1−2 送信機のファンクション設定で、S-BUS用を参考にチャンネルを設定する。
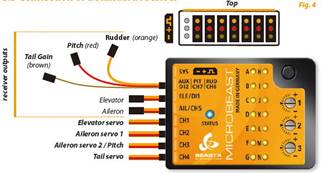
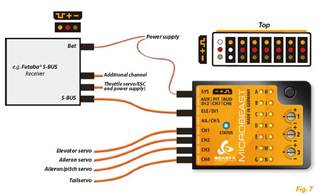
1−3 レシーバーと本体(MB)を接続する。
今回はノーマルレシーバー使用するので左下接続で!!(S-BUS接続は右下接続)
2.各項目設定作業方法
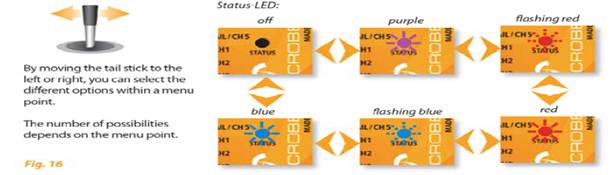
2−1 メニュー内でのパラメーター選択は、スティック左右に倒すことで設定できます。
選択されるパラメーターはStatus-LED の色で確認します。
※トリム調整を行う場合はエレベータースティックを使用します(ラダースティック以外を使うこと
もあります)
2−2 Menu point の移動
メニューポイント内で、選択を確定・終了させ、次のメニューへ移るためにはセットアップボタンを
短く1回押します。
メニューポイントをスキップする場合は、どのスティックも動かさないうちにボタンを押すことでそ
のメニューはスキップされ、次のメニューポイントに移動します。
※スキップは何度でも可能ですので、設定途中からメニューを終了させる(抜ける)には、何度もボ
タンを押します。
※Setup
Menu、Parameter
Menu において最終のメニューポイントでセットボタンを押すと、フラ
イト可能な状態になります。
また、各メニューポイントで4分間何も動作が無ければ自動的にメニューモードを終了します。
併し、Setup D・G・I・J のポイントでは、この自動終了は働きません。

3.レシーバーの選択
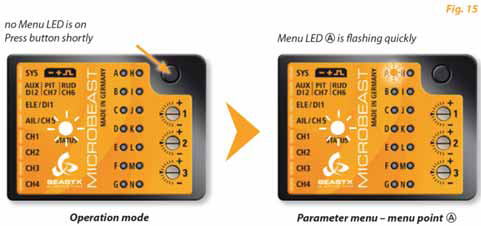
3−1 セットボタンを押したまま、電源をON にします。Menu LED A (黄色)が点滅したらセット
ボタンを離します。
今回はノーマルレシーバーなのでoffのStandard receiver を選択する。(S-BUSの場合は赤点
滅のfutaba-s-busを選択する。)
セットボタンを短く押すことによりMenu LED B が点滅し、しばらくしてStatus-LED が青く
点灯します。
※Menu LED B へ移行しても、Status-LED が青く点灯しない場合、受信機と送信機がバイ
ンドしているか、もしくは、Receiver
menu A
の選択が正しいかを確認します。

3−2 基準のch割当ての読み込み
セットボタンを長押しして確定します。これにより標準のch割当てが読み込まれ、Menu point
LED はN に移行します。
※この作業でB−Hにて設定されていたch割り当ては上書きされます。
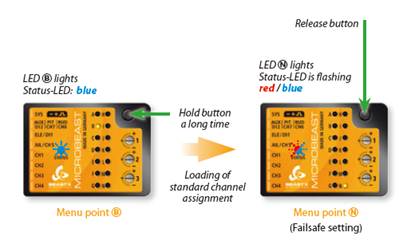
3−3 フェイルセーフ機能の設定
Standard
受信機を選択した場合はこの設定は不要です。フェイルセーフは受信機側で設定してく
ださい。
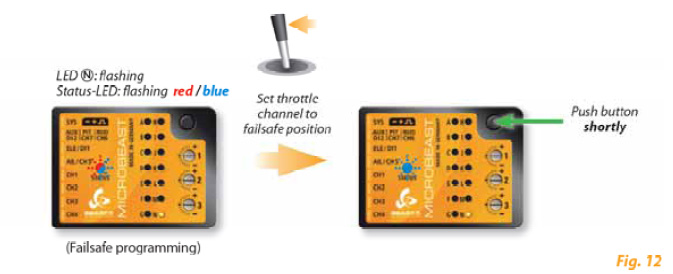
セットボタンを押し終了!!
4.セットアップ開始
Menu LED がいずれも消えていることを確認し、セットボタンを長押し、
LED A が最初点滅しますが点灯し続ける状態になるまでボタンを押します。

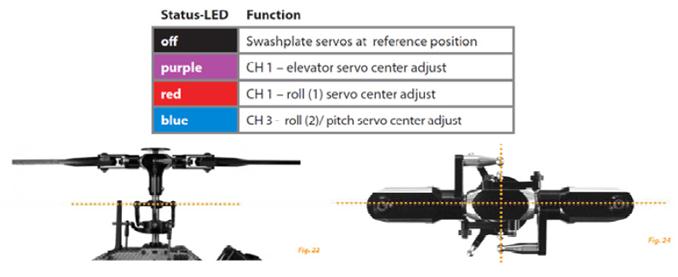
4−1 A Microbeast の設置方向設定
* 横置きにしたいので、blueに!

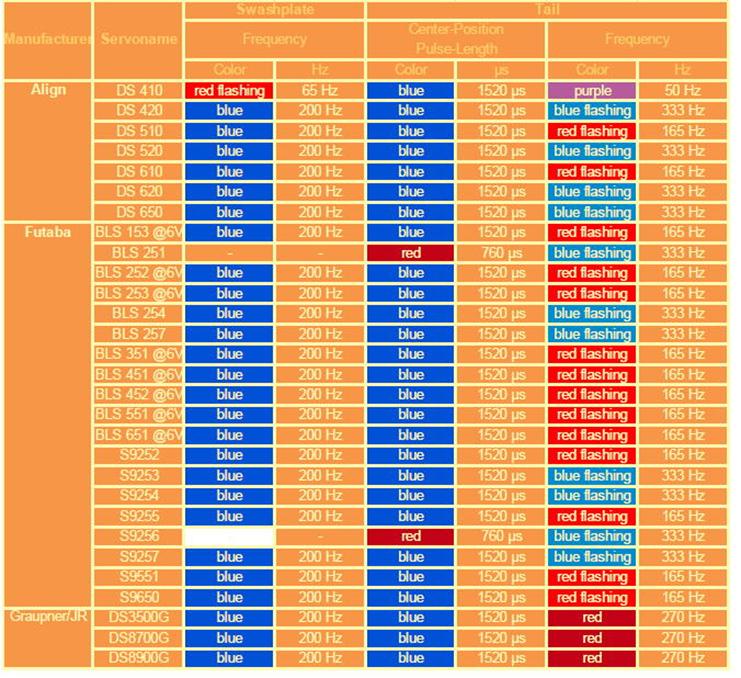
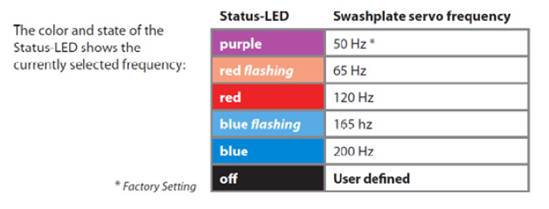
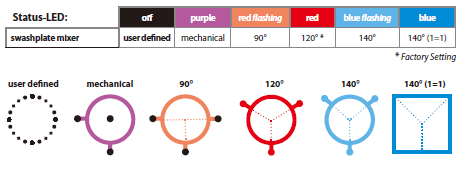
4−2 B スワッシュサーボの周波数設定(添付一覧参照)
* BLS252サーボは200Hzなので、ラダースティックでblueに!
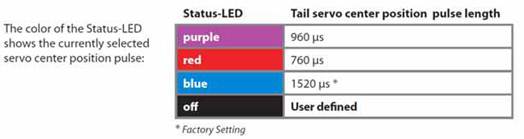
4−3 C ラダーサーボのパルス設定
* BLS252サーボは760μsなので、ラダースティックでredに!
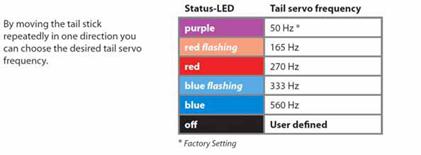
4−4 D
ラダーサーボの周波数設定
* BLS252サーボは333Hzなので、ラダースティックでblue flashingに!
4-4-1 サーボの周波数等の設定が完了したので、N項目までスキップさせる。
メニューポイントをスキップするにはどのスティックも動かさず、ボタンを押す。
4-4-2 サーボとレシーバーを接続します。
4-4-3 再度セットアップを開始し、D項目まではスキップし、次の4−5項に続く。
4−5 E ラダーエンドポイントの設定
ラダーの動作方向が正しいかを確認します。違う場合は送信機ラダーchのリバース設定で変更する。
ラダースティックを右のエンドポイントまで動かしてスティックを離します。
暫くすると、Status-LED が点滅してから赤か青に点灯します。次に左ラダーも同様に設定します。
※行き過ぎた場合はスティックを逆に切り戻してスティックを離します。
※もし、Status-LED が点灯しなかったり、別の色だった場合は、サーボの動作幅が狭すぎるのでサ
ーボホーンのリンケージボールを短くします。

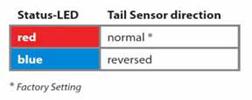
4−6 F ラダージャイロ方向の設定
次のように動作の確認をします。
※変更はラダースティックを操作し、Status-LED の色でも確認します。
4−7 G スワッシュサーボのセンター位置設定
ニュートラルの設定します。送信機のピッチは50%にして、サーボのニュートラル(ホーン90度)
でピッチ0度を設定。(ヘットを外しスワッシュレベラーを装着した方が良い)
Gに切り替わった時、Status-LED
がoff になり、スワッシュサーボは、サーボニュートラルポイント
に動きます。
ラダースティックをどちらか一方に動かすと、Status-LED の点灯色に応じたサーボを選択でき、
エレベータースティックを上下させ、各サーボのトリムを設定(サーボホーン90度)にします。
※サーボ間を行き来して何度も調整することができますし、Status-LED off でゼロポイントを確認で
きます。この動作によっても、既に調整されたトリムは保持されています。
リンケージ同様、位相もきっちり調整しておきます。
(スワッシュレベラーを使用した場合は外し、ヘットを装着する)
4−8 H スワッシュモードの設定
機体に合わせた、スワッシュモードを設定します。
* 550は120°なのでredを選択!
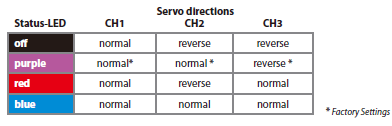
4−9 I スワッシュサーボのリバース設定
スワッシュサーボのリバースを設定します。
どの設定でもうまくいかないときは、送信機のリバース設定を変更して正常動作するようにします。
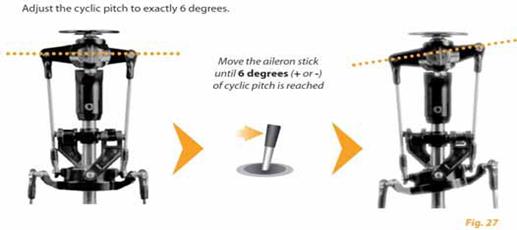
4−10 J 基準サイクリックピッチの設定(このメニューに入る時に送信機のスティックを動かさない)
Jメニューに変わるとスワッシュはニュートラルポイント状態になります。この時、ピッチは0 度
のはずです。
サイクリックピッチを計測するので、測定用のスタビバーを機体ヘットに装着し、メインローター
をつけます。エルロンスティックをどちらかに動かして、正確に6度に設定します。
※もしも、ピッチが行き過ぎても、逆にスティックを動かせば戻せます。
また、ラダースティックを動かすと、リセット(ニュートラルポイントへ戻る)できます。
Microbeast
がこの位置を読み込んだ後、Status-LED が青点灯することを確認します。
※LED
が青点灯しない(赤・青・消灯)場合、リンケージがFBL に合わないことを示します。
サーボがもっと動くようにリンケージを調整し、再設定してください。
4−11 K コレクティブピッチ範囲の設定
送信機のエンドポイントは±100%、ピッチカーブは-100から+100%する。
ピッチスティックを最大・最少ピッチにして、ラダースティックを動かし±12°に設定します。
※この設定を最大・最小として、実際のフライトに合わせてピッチカーブを設定します。
4−12 L サイクリックピッチ(スワッシュプレート)リミットの設定
サイクリックピッチ(スワッシュプレートの傾き)のリミット設定を行います。
この設定により、Swash-Ring 同様の制限が設定します。(サイクリックピッチは10〜12 度)
慎重に、ピッチ・エルロン・エレベータースティックをすべて最大位置に動かし、リンケージ
が突っ張るか、それ以上動かなくなるところがフルスティック位置になるように、ラダーステ
ィックでスワッシュの傾きを増減します。
※この設定において、Status-LED は十分なリミット位置であるかを示します。理想的な位置にあ
る場合、Status-LED は青点灯します。しかし、全てのヘリコプターが理想的な位置に対応す
る訳ではありませんので、その場合は、可能な限り大きくスワッシュが傾く位置で設定するよ
うにします。Status-LED が紫色か消灯している場合は、リンケージを見直すことをお勧めし
ます。リンケージを変更した場合は、セットアップメニューのG、J、K を再設定する必要が
あります。
4−13 M スワッシュジャイロセンサー方向の設定
ヘリを手に持ち、エレベーター方向・エルロン方向に機体を傾けた反対側へスワッシュが動く
ように設定します。正しい動作の組み合わせになるまでラダースティックで下表から選択し、
設定します。

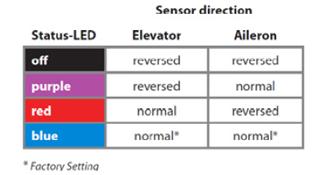
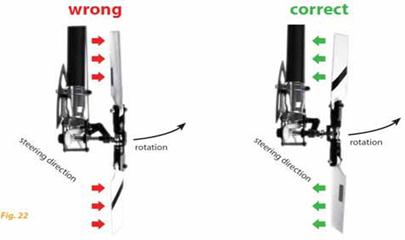
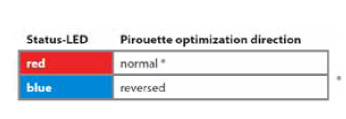
4−14 N ピルエットミキシング動作方向の設定
Nメニューに移行したときに、スワッシュプレートは、前か後ろに傾きます。
機体を 次の図 のようにメインマストを軸に回転させます。
このときにスワッシュの傾きが保たれることを確認します。

スワッシュが、機体の回転によって動くなら、下表の設定を変更します。
これで、セットアップは終了!!
先に(次に)パラメーター設定で、「5−2項のB 飛行特性の選択」と「6−4項 ラダージャイロセンサー感度」を設定する。
【1】Menu LED がいずれも消えていることを確認し、セットボタンを短く押します。LED A が点滅します。
A項はスキップさせ、B項に移動させる。(詳細は5−2 B 飛行特性の選択を参照)
*プロポでD/RとEXPを使用したいのでtransmitter・LED blueを選択する。
【2】次にF項までスキップさせパラメーター設定を終了させる。
【3】電源をいれ、ジャイロ感度の確認をする。(6−4 ラダージャイロセンサー感度を参照)
【4】送信機のジャイロ感度設定メニューを選択して、値を上下させLED Eが点灯するように設定する。
これでフライト準備完了!!
初フライト時の留意点
「電源ON 後、Microbeast は初期化されます。このとき、Microbeast
本体及び機体を動かしてはいけません。短いLEDテストの後、
ファームウェアバージョンを3 秒間表示します。その後A からG のLED が点灯(センサーキャリブレーション)し、
続いてH からN のLED が点灯(受信機信号のチェック)します。
以上のプロセスが完了した後、スワッシュプレートが少し動くことで使用準備が完了したことを知らせます。
同時にStatus-LED
が点灯してラダージャイロモードを示します。(青:ヘディングロック、紫:ノーマル)
そして約10 秒間、
現在のラダージャイロ感度をLEDA
-N に表示します。」
(1) 電源投入後、Microbeast の初期化が終了し、飛行可能な状態となるまで待ちます。
⇒スワッシュサーボが動き、Status-LED が青か紫色に点灯すると初期化終了です。
※初期化中は機体をできるだけ水平に、そして絶対に機体・Microbeast 本体を動かさないようにします。
※風が強い時は揺れないように機体やローターを押えるなど対策を講じます。
(2) 特に初フライト時は、各パラメーターを推奨設定か穏やかなほうに設定しておくことをお勧めします。
Dial1-3、ラダージャイロGain F/G 以下、飛行特性:sports など。
(3) 初フライト前には、動作の確認(スティック動作方向・ジャイロ動作方向)を行ってください。
(4) フライバーレスシステムはジャイロシステムですので、スティックと連動・追従してしてスワッシュやラ
ダーが動くわけではありません。
※スワッシュもラダー用ヘディングロックジャイロと似た動作をします。スティックを大きく動かしてもスワッシュは大きく動きません。
また、スティックを小さく動かして止めていると、スワッシュはフルに傾く場合もあります。(トリムを使わないのもラダーヘディング
ロックジャイロと同じ理由によります)
(5) フライト前にスワッシュプレートの水平を確認してください。また、テールピッチスライダーがセンター付近にあることを確認してください。
※ラダーのリンケージセンターはジャイロモードをノーマルモードにすることで確認できます。
(6) フライバーレス機の離陸時に過度なスティックワークを行うと機体が暴れやすくなります。不慣れな場合、機体をひっくり返すこともありますよ。
(7) フライバーレス機に不慣れな方は、ローター回転が十分な回転数に達したら余計な修正を行わずに単純に
ピッチアップする離陸を心がけてください。
(8) 最初の調整はラダーGain を合わせるこをお勧めします。
これからはフライト調整!!
5.パラメーター設定
Menu
LED がいずれも消えていることを確認し、セットボタンを短く押します。LED A が点滅します。
※目的のパラメーター以外をスキップするには、そのメニューポイント中にスティック操作をしないでセ
ットボタンを押すとスキップできます。
5−1 A スワッシュプレートサイクリック基準設定(フライト中ずれのトリム調整)
このパラメーターは、機体のトリム調整として使います。たとえば、ピッチUP/Down でトリムず
れがある場合やピルエットのトリムずれ修正として、Setup menu-G で設定したサーボセンター位
置のトリムを設定します。
※Microbeast
を使う場合、送信機のいかなるトリム・サブトリムは使わないでください。
Microbeast はトリムとして認識しないでスティックが操作されたと認識してしまいます。
この設定では、サーボ個々のトリム調整ではなく、スワッシュの傾きを設定します。
設定方法:
1) トリムを入れたい方向へエルロンもしくはエレベータースティックを動かします。
2) スティックの傾きに応じてスワッシュプレートは傾きますが、ラダースティックを動かすことに
よって、初期位置に戻すことができます。
3) 必要なトリム量=スワッシュの傾きでセットボタンを押して終了します。
※セットボタンが押されると同時に、Setup menu-G で設定したサーボセンター位置も更新されます。
(元には戻れません)
※Parameter
A を設定した場合、センター位置しか更新されないため、setup menu の再設定をすべき
だとの意見が海外Forum で推奨されていました。(ピッチ範囲などその他の設定も更新するべきと
のこと)
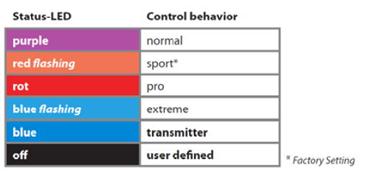
5−2 B 飛行特性の選択
ここの設定は、あらかじめMicrobeast に記憶されている飛行特性(舵の効きやレスポンス特性)を
選択します。
デフォルト設定はsport モードです。初心者の場合、最初はnomal を選択することをお勧めします。
好みのモードをラダースティックで選択します。もしも、各モードで満足できないときは
Status-LED:青を選択してください。一切のエキスポやD/R が初期値となりますので送信機上でこ
れらを設定することができます。
※送信機で「D/R」・「EXP」・「ジャイロ感度調整」を使用する場合はtransmitterにする。
マイクロビーストのプログラムは次のように値になっているようです。
.....................Normal.....
Sport..... Pro....... Extreme...... Transmitter (Custom by Tx)
Cyclic
DR .........60 ..........70 ........80 ...........90 ................100
Cyclic
Expo ......40 ..........30 ........20 ...........10................... 0
Tail
Dual Rate...60 ..........70........ 80 ...........90 ................100
Tail
Expo ..........45 ..........35 ........25 ...........15 ...................0
【Status-LED:青選択時の留意事項】
エルロン・エレベーターのロール・フリップレートやラダーのピルエットレートは、エンドポイント
やD/R などを増減させて設定可能です。尚且つ、ラダージャイロをヘディングロックモードで使って
いる場合はMicrobeast が制御できないピルエットレートを設定できる特性となります。
(とても速いピルエットが可能)
1) この状態は Status-LED で確認できます。
2) 通常ラダースティックを動かすと、LED
が点滅しています。この状態にあるうちはMicrobeast によ
りピルエットレートが管理されます。
3) 更にラダースティックを打つかエンドポイントを上げると途中からLED が消灯します。この時点から
ピルエットレートはMicrobeast のレート制御を離れ、機体側が許す限りのピルエットレートで動くよ
うになります。
※これらは、特別なマニューバを実行するためだけに使ってください。通常はLED が消灯しない条件で
設定してください。
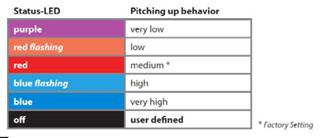
5−3 C 頭上げ補正の設定
フライバーレス機の頭の上げ下げ補正を行います。
【設定方法】
1) ある程度速度を載せた水平直線飛行でピッチを上下させた時の頭の上げ下げを見ます。
2) もしも、頭上げや頭下げが起きるならば、この設定を強くしていきます。
3) ピッチ操作により機体は水平を保たれることが理想ですが、この補正設定を強くすると機体の反応
レスポンスが落ちますので注意して設定してください。
※もしも、設定を強くしても頭上げ下げが激しい場合は、5−1のDial1のGain を高くしてみてください。
それでも改善されない場合は、精度の高い高速・高トルクなサーボに換装するか、フライバーレス専用
ローターを使用するなどを検討してください。
5−4 D ラダージャイロ ヘッドロック感度設定
ラダージャイロ制御におけるヘッドロック度合いの設定を行います。
【設定方法】
1)
ヘッドロックGain
を低い設定でスタートし、その状態で6−4のジャイロGain の設定。
2)
徐々にヘッドロックGain を高くしていきます。
3)
ヘッドロック
Gain が低い内は、水平飛行ピルエットや横風のピルエットでピルエットレート
が不安定に感じます。
4)
ヘッドロック
Gain が高すぎる場合、ピルエット後の止まりが不安定になります。また、ホバ
リングなどでゆっくりとテールが揺れたりします。
5)
最適値に設定してください。
※ラダーの最適な調整を行うために、一旦ノーマルジャイロモードにしてリンケージ上のニュートラ
ルをきちんと設定することをお勧めします。
ノーマルジャイロモードでラダーが左右どちらかにドリフトする場合、リンケージの調整します。
この調整を行った場合は、ラダーのリミットの再調整を行ってください。(Setup menu E)
※Parameter
B で送信機調整を選んでいる場合、ラダー操作時にLED が消灯しない状態にある
ことを確認してください。Parameter Bを選択している場合は送信機でジャイロゲインで変更?
5−5 E デッドバンドの設定
エレベーター・エルロン・ラダーのスティックに対するデッドバンド設定を行います。
この設定は、市販の送信機のスティック精度が悪い場合に、スティックを動かさなくても
Microbeast が反応してしまう場合に設定します。また、通常のデッドバンドとして好みに応じて
設定してください。
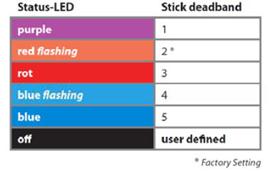
おそらく次のような値になっているのではないかと??あっているかは?
LED A〜C点灯 Very low
LED D〜F点灯 low
LED G〜I点灯 medium
LED J〜L点灯 high
LED M〜N点灯 very high
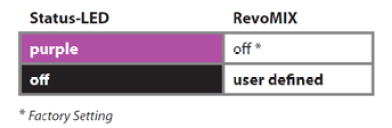
5−6 F ラダーRevoMIX の設定
フライバーレス機の高性能化に伴い、ピッチ操作におけるRevoMix がファームウェアV2.0 で追加
されました。設定はUSB 接続のPC 上でのみ行えます。
6.ジャイロ感度設定
Dial1〜Dial3の感度調整をします。
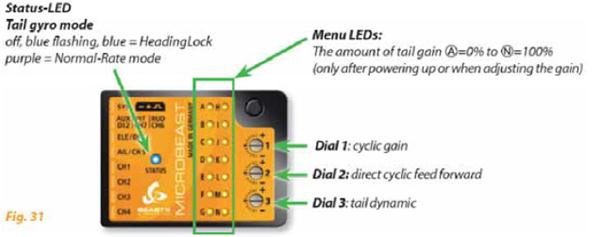
Dial1〜Dial3 のデフォルト設定は、Fig.31 に示す本体方向で見ると水平です。
6−1 【Dial1】Cyclic gain:サイクリック感度
+Gain:安定感が高まる。舵を打って止める時の止まりが強く感じるようになる。
※Gainが高すぎた場合は、ハンチングが出やすくなる。(特にエレベーター方向に出やすい)
−Gain:低くすると直線飛行で不安定に感じる。舵を打ったあとの止まりが曖昧に感じる。
※450クラス以下の機体では、デフォルト位置より少し感度を下げてテストすることをお勧
めします。
6−2 【Dial2】Direct cyclic feed gain:サイクリック制御方向感度)
サイクリック(Elev/Aile)のスティック操作に対する動作レスポンスを調整します。
感度を高くすると大舵も効くようになります。感度を下げるとソフトな感じになります。
※あくまで動作レスポンスの調整で、舵の効き(レート)が早すぎるか遅すぎるかは、スワッ
シュリミット設定(Setup menu L)やSetup menu B,もしくは送信機のD/R などで調整します。
6−3 【Dial3】Tail dinamic:ラダーサーボの動作感度(他のジャイロでいうDELAY設定みたいなものか?)
このダイアルでは、ラダーのレスポンスと止まり具合を設定します。
Gainが高いとテールが過敏になりハンチングがでやすく、低いとソフトになる。
※この設定の前に、次項(ラダージャイロセンサー感度)のラダージャイロの感度設定を済ませ
ておく。Gain を上げるとラダーのレスポンスが上がり止まりも良く止まるようになります。
しかし、Gain を上げすぎると止まりで収束できずにハンチングしやすくなります。
反対にGain が低すぎると反応が鈍く、止まりもソフトすぎてしまうでしょう。
※理想的には、余計なテールローターのバタつきなく止まるように・・・・
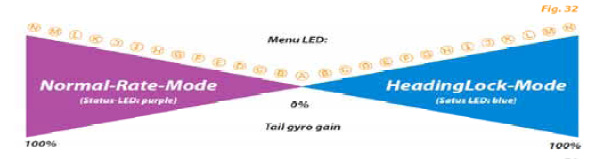
6−4 ラダージャイロセンサー感度【送信機のジャイロ感度で設定】
Status-LED:紫はノーマルモード、Status-LED:青はヘッディングロックモード
※起動後などフライト可能モードになった時の約10 秒間、もしくはラダージャイロ感度調整時
にはその時のGain をMenu-LED で表示します。A:0%・・・・・・N:100%
※最初のフライトに際しては、F もしくはG 以上にGain を上げないことをお勧めします。
※最適値を得るためには、できるだけ低いGain から徐々にGain を上げていき、最終的にジャ
イロがしっかり効き、かつハンチングが出ないGain とします。
ファームウェア・ハードウェアバージョンの表示
Microbeast は電源投入後の初期化中にソフトウェアおよびDATA バージョン、ハードウェアのバージョン表示をします。
【バージョン確認方法】
電源投入後の全てのLED チェック終了後、約3 秒間Status-LED は赤点灯になりバージョン表示モードになります。
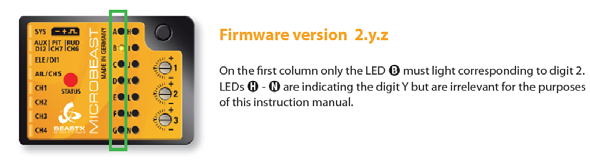
(1) まず、ソフトウェアファームウェアバージョンx.y.zの最初の2桁がメニューポイントLED にて表示され
ます。
ファームウェアバージョン x.y.z=(A-G).(K-N).z
(2) 次にセットボタンを押すと、Status-LED が紫点滅になり、3桁目z=(A-N)を表示します。
(3) もう一度(2回目)セットボタンを押すと、Status-LED は青点滅になり、DATA バージョンx.y=(A-G).(K-N)を表示します。
(4) さらにもう一度(3回目)セットボタンを押すと、Status-LED は消灯しハードウェアバージョンx.y=(A-G).(K-N)を表示します。
(5) もう一度セットボタンを押すと初期化プロセスに戻ります。
※(A-G)の場合、A=1,B=2,,,,,消灯=0
※バージョン表示プロセスがない場合は、古いファームウェアになります。
※ファームウェアの確認が最も大事です。最新のファームウェアを使用することをお勧めしますが、古い
バージョンを使いたい場合はバージョンに従ったマニュアルで運用してください。
※本マニュアルは、ファームウェアバージョン2.y.z のみ適用します。
サーボ設定表