MikadoのV-bar5.0設定方法。
それでは早速,セットアップの解説に入ります。(FUTABAの場合)
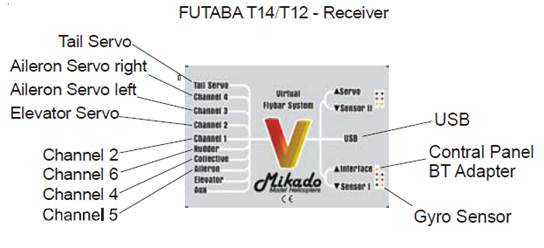
はじめに,受信機と V-barを,ケーブルで接続します。
説明書にはよくわからない英語で書いてあって混乱を招くので,
以下のように接続してください。
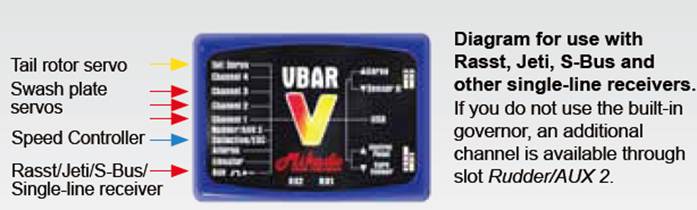
以上で接続が完了しました。
次に,送信機側の設定をします。
新規の機体を作るほうが早いと思います。
この時,スワッシュのモード選択を「H1」(1サーボ)にしてください。
3サーボのCCPM120(H-3やHR-3)を選ぶと正常に動作しません。
とりあえず,それができていれば他は何もしていない状態でOKです。
先程基本の設定第一段階が終わってこれからは、ヘリの基本設定です。
リンケージの調整 サーボホーンのニュートラル出し スワッシュプレートの水平調整などの設定です。
V-Bar5.0PROのソフトをパソコンで起動し送信機・受信機の電源もONして、
パソコンとV-Bar5.0PROをUSBケーブルで接続します。
V-Bar5.0PROのソフトウェアー上部Connectが緑色になったか確認後に初期画面右上部の
SetUpを押して下さい。
(参照画面は、接続されていませんので USB No Conectionです)
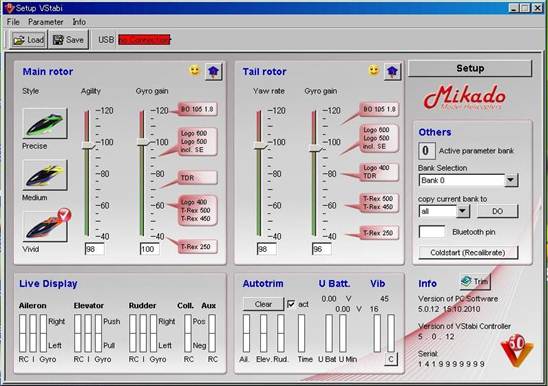
全てジャイロが解除され リンケージのニュートラル調整が、可能になります。
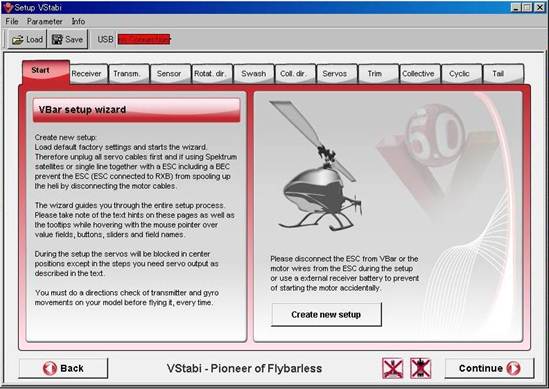
設定にはいります。continueボタンをおしてください。Receiver設定に移ります。
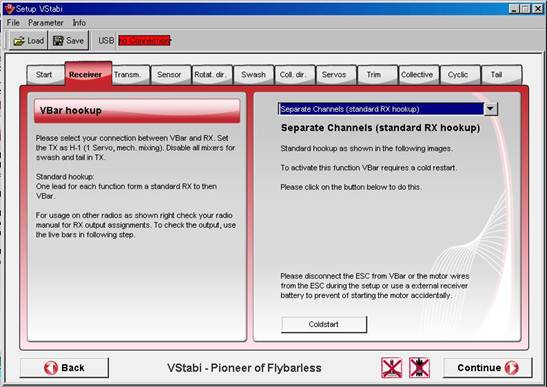
ここでは、自分の使用するレシーバーの種類を選択します。
通常多くの方が使用している「フタバ・SANWA・JR」の受信機を使用する場合は、デフォルトのままで
OKです。スペクトラムや、一部のサテライトレシーバー機能を使用できる機種を使用する時は、その項目を
選択します。今回のソフトウェアバジョーン5.12より S−BUSも対応しています。
続いて送信機のキャリブレーション スティック・トリムのニュートラルを設定します。
各舵のピッチのモニターを確認しながら、送信機のニュートラル位置をSet Centerを押し確定します。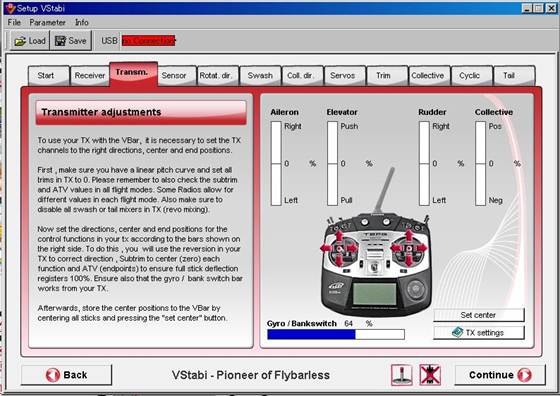
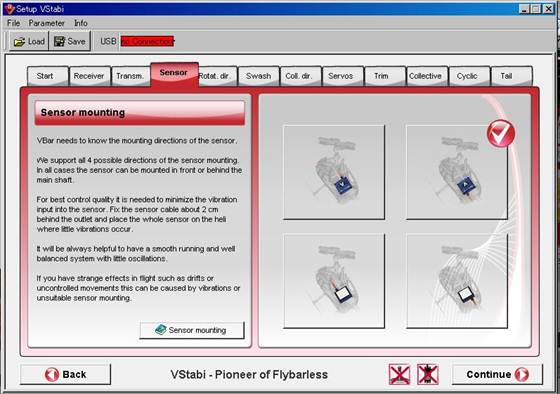
続いて3軸センサーの搭載方向設定です。
V-Bar5.0PROは、mini-V-Bar5.0とセパレートタイプの2種類がありますが、自分の搭載するセンサ
ータイプと搭載方向を選択します。「私の場合(T-REX700)は、参照画面レ✔です。」
続いてメインローター回転方向の設定です。通常は、右回転ですので参照画面のレ✔です。

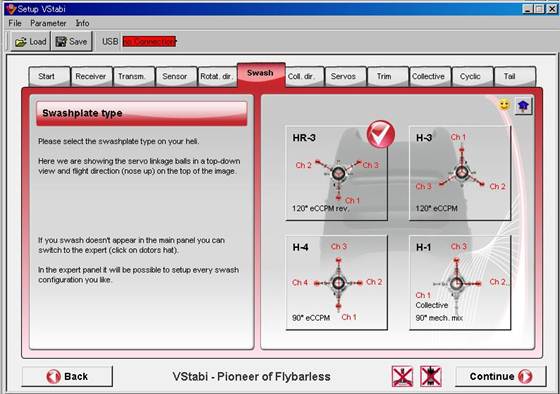
続いてスワッシュタイプの設定です。自分の設定対象機種を選択して下さい。(取扱説明書等を参照)
T-REX700はH−3を選択(リバースがうまくいかない場合はHR-3を選択している方もいます)
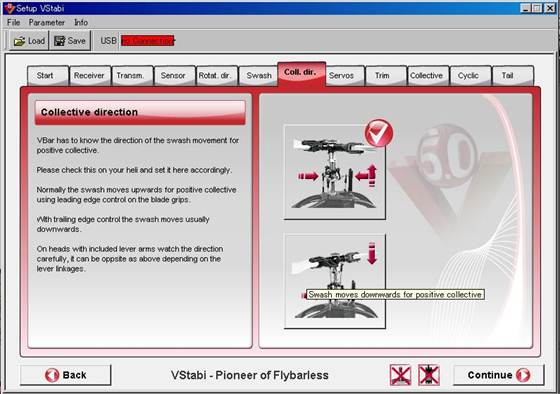
続いてピッチアップの方向設定です。
ピッチがプラスになるのは、スワッシュが上に行く時か下に行く時かを指定します。
国産ヘリやT-REXは全部、スワッシュが上がるとピッチアップですので、参照画面の✔です。
続いてスワッシュサーボのリバース設定です。
1番最初にLive Displayにて 送信機スティックの動きを確認しましたが、ココでは、実際に動かしてみると
バラバラに動いてしまうサーボのリバース設定を、1サーボづつ設定していきます。
エルロン・エレベーター・ピッチが、正常に動作するように、ここで設定します。
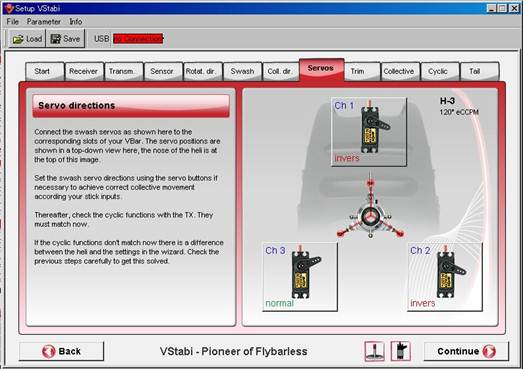
ch1にエレベータ・ch2にエルロン(機体の右側)・ch3にピッチ(機体左側)サーボを接続で!!
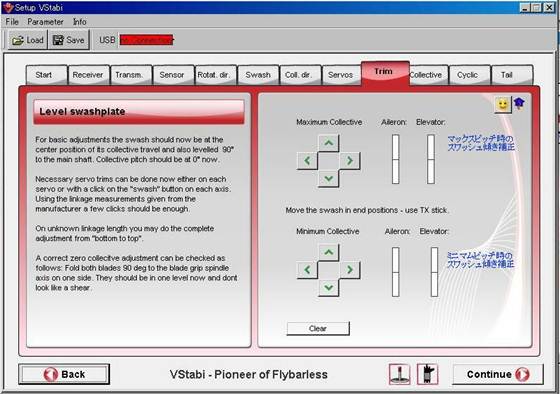
続いてゼロコレクティブSetUpの設定です。
この項目では、スワッシュプレートの水平出しとMaximumピッチ Minimumピッチ時のスワッシュ補正を行います。
また 微妙な0度のズレを補正する事が出来ます。
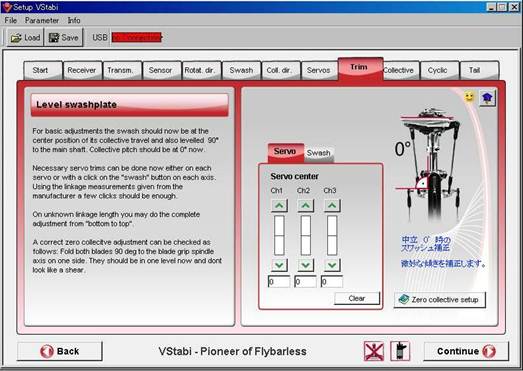
スワッシュレベラーを機体に装着します。
次にスティック中立時(アイドルアップ1など)にピッチ角を0度に設定します。
基本的には、機体のリンケージにて合わせます。微妙なズレが出る場合は上記機能で補正をします。
続いてコレクティブピッチの数値(最大ピッチ・最低ピッチ)を設定します。(およそ80%位で±12度)
自分の理想的なピッチが構想にある方は、算出方法がありますので、ご紹介致します。
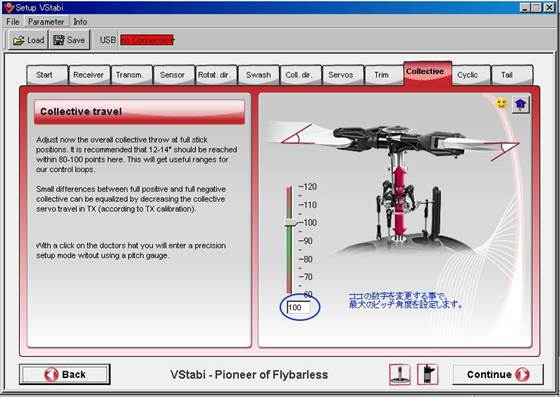
大学院の帽子みたいなマークを押すと裏設定が出てきます。下です。
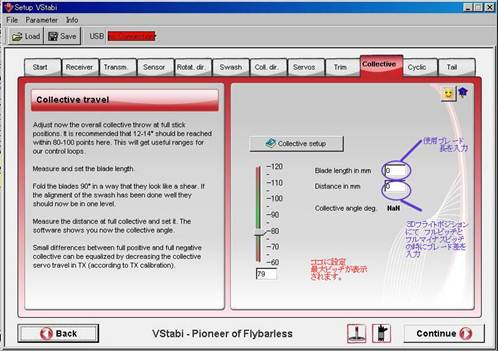
この画面出てきたら 使用するブレードの長さを入力し次に実際に機体を以下のように測定した値を入力します。
算出方法は、ヘリのブレードをブレードホルダーに収納する様に90度同じ方向に折ります。
そのまま機体に対して右又は左側持って行きます。
そしてピッチカーブをリニアーで中立0度の設定されているフライトポジションを選択し、
スティック中立で0度からフルハイにしてブレードAとブレードBの差(距離)を計ります。
私の場合29.5cmでこの数値を Distance in mmに入力します。
すると実際の最大・最低ピッチがCollective angle degに表示されます。
12.34度もしこのピッチ角ですくなければ、数値入力窓に適当な入力をして目的の数値になるように設定して
下さい。
続いてサイクリックピッチ最大舵角を設定します。(80%位で8度に!!)
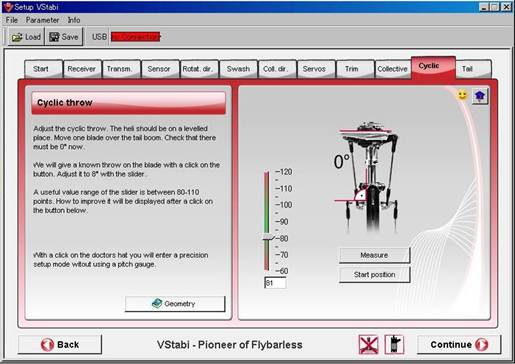
またも、大学院の帽子みたいなマークを押し裏設定メニューに変更します。
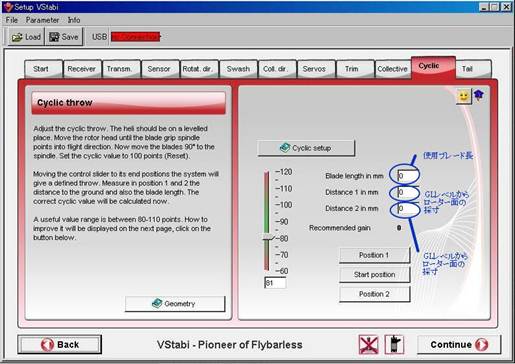
先に使用ブレード長を入力する。
算出方法は、ヘリのブレードをブレードホルダーに収納する様に90度同じ方向に折ります。
そのまま機体に対して右又は左側持って行きます。そしてピッチカーブをリニアーで中立0度の設定されている
フライトポジションを選択し、ヘリをテーブルや地面に置き折ったローターを軽く持ってPostion1を押して地面
からローター先端の距離をスケール等で測定してDistance1 in mmに入力します。私の場合595mmと入力。
続いてPostion2を押して地面からローター先端の距離をスケール等で測定してDistance2 in mmに入力します。
私の場合265mmと入力。するとRecommended geinに表示される数値を入力します。
すると、的確な舵角を手に入れる事が出来ます。
最後は、テールの設定です。
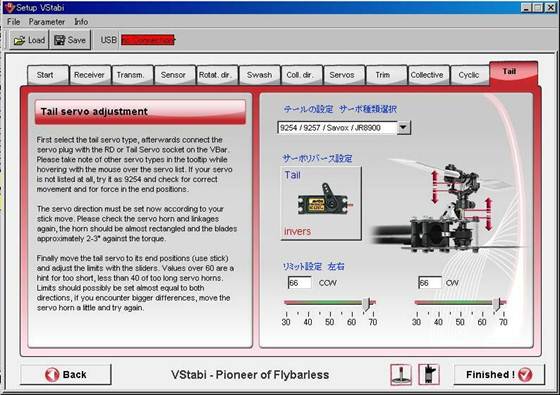
ラダースティックを目一杯切ったとき、舵角が最大になるようにスライダーの数値をいじって調整します。
センサーのリバース設定もここで変更します。(テールを右に振る→スライダーは左へ動く)
終了!!
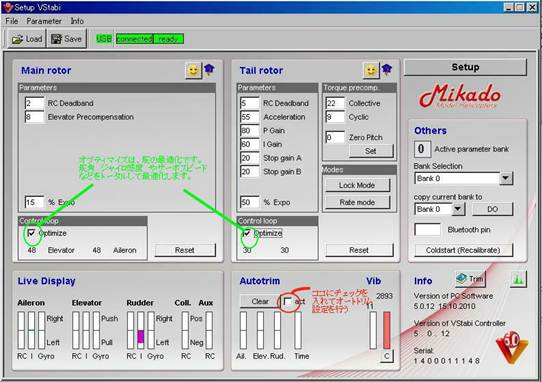
オートトリム機能設定 簡単に言いますと手動でトリムを取る必要がありません。V-Bar5.0の設定画面で
オートトリムのチェックボックに✔を入れます。
その後にUSBケーブルを抜き送信機電源〜受信機電源の順番に電源を入れます。
この時にスロットルスティックがフルハイ(ピッチが最大になる様に)予めしてからの受信機の電源投入をします。
(私の場合はスロットルホールドにして(ピッチカーブは、0から100のリニアーです。)スティックを一杯に
上げ電源を入れます)
すると、通常1回で終わる初期化のプロセスが2回行われます。
これが、オートトリムデータ収集飛行のSwitch入った印です。
その後、ホールドスイッチを切り、ノーマルモードでエンジン始動約2分間くらいのホバーリングをします。
流れてもいいので、流れたら元の位置に戻す感覚でひたすらホバーリングをします。
2分位経過したらヘリを下ろしエンジンを停止、再度パソコンと機体に搭載しているV-BAR5.0を接続しオートトリム
のチェックボックにレを外します。
この時TImeに緑色で飛行データの収集状態が表示されます。満杯になっていれば、OKです。
今度は、普通に飛ばしてみて下さい。オートトリムのおかげでヘリが格段に安定します。
続いて、オプティマイズ この機能は、簡単にいえばメインローター舵、テールローター舵の最適化です。
ヘリのリンケージもひとによってさまざま 舵の効き具合も好みが分かれます。
このオプティマイズは、舵角や、ジャイロゲイン、サーボスピードなどを加味してトータル的に舵の効き具合を自動調整
して最適化します。
こちらも設定は、簡単飛行させる前に2ヵ所のチェックボックにレ✔を入れホバーリングにて浮かします。
ヘリが浮上したら、エルロンを右にゆっくり切り、次に左にエルロンをゆっくり切り。
続いて、右にエルロンを少し大きめに切り、次に左にエルロンを少し大きめに切り。
最後に 最大でエルロンを右に切り、次に左エルロンを最大で切ります。
この作業をエレベータ及びテールと進めます。
完了したら、ヘリを下ろし、USB接続したパソコンのオプティマイズ2ヵ所のチェックボックのレを外し完了です。
RC Deadband ・・・・ラダースティックから待ち時間かな、、、速い遅いの何か フタバ受信機のHSモード、Nomモードみたいな感じ Accereration ・・・ ラダーのアクセラレーションです。トップスピードでピル エット開始 I Gain ・・・・・・・・・ Styleと同じ感じ (ジャイロロック度合)テールロック保持力の調整 P Gain ・・・・・・・・・ Agilityと同じ感じ(スティックへの追従性)ピルエットの速さ Stop gain A ・・・・ 右ラダーを中立に戻したときの止まりの強さ Stop gain B ・・・・ 左ラダーを中立に戻したときの止まりの強さ ストップゲインを上げるとピルエット急停止が可能になります。 まずは、RC Deadband この設定は、送信機スティックの不感体調整です。 ニュートラル付近のあそびとでも言いましょうか?? V−Barジャイロが感じ取る スティック入力信号のニュートラル付近の感度 調整ですね 数値を小さくすると中央部分感度が上がりますが、小さすぎると手 を放しているのに常にスティックを操作している状態になってしまうで、お使い になる送信機で実際に調整してください。 VStabi_53
V usb Dr
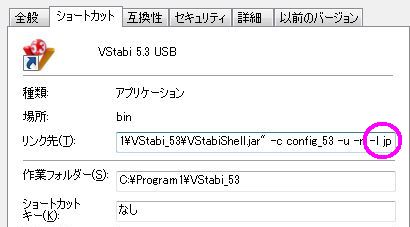
V usb2 Dr 日本後化